

【GDC 21】SQUARE ENIX 公开与机器人动作相关的全新系统“MULS”
于台湾时间 7 月 20 日开幕的“游戏开发者大会(Game Developers Conference)2021”首日,来自 SQUARE ENIX 的主讲者举行了一场名为“动画讲座:来自设计:为了机器人的完全可程式化动画(Animation Summit: From Design: Full Procedural Animations for Mechs)”的讲座。
这场讲座是和 SQUARE ENIX 公司目前正在开发,为了让机器人的动作能够表现得更为写实的动画系统“MULS(Multi Unit Link System)”相关之讲座,主讲者是来自同公司的资深人工智能工程式并木幸介,与人工智能工程师森寅嘉。配合技术展示影片,解说与该系统有关的各种情报。

MULS 开发目的,是要建立一个可以对应能让玩家完全自由组装机器人之游戏的动画系统。
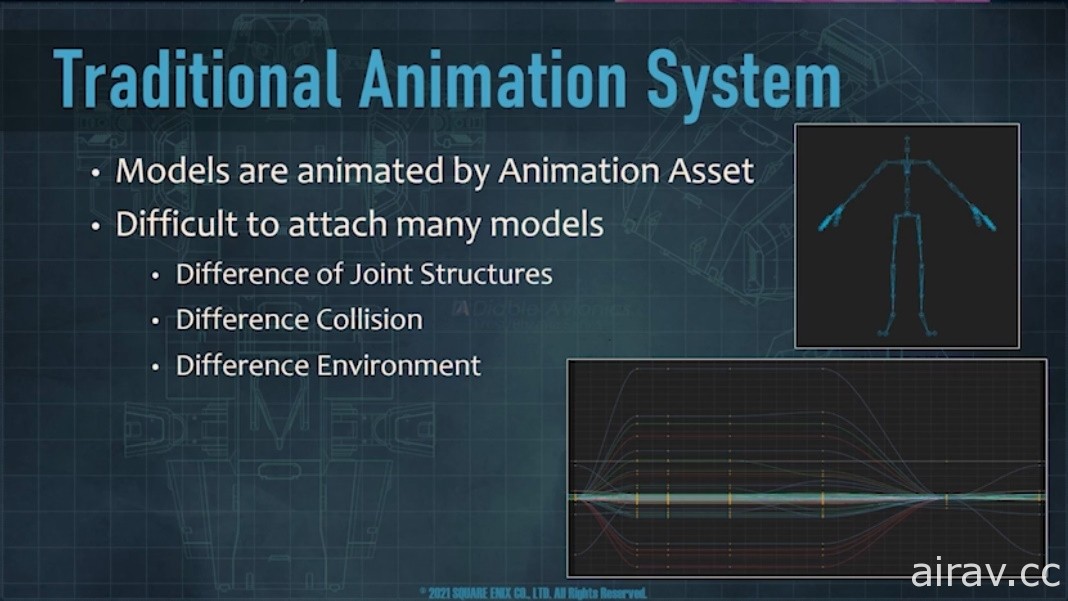
过去在这一类游戏当中,像是手脚等部位,以及这些部位的动作,都是要透过设定事先制作好的材质来表现。使用这种方式制作,动画就会被事先制作好的动作所限制,很难让机器人的造型和零件设计有更多变化出现。SQUARE ENIX 公司就是为了解决这个问题,才开始着手制作 MULS。
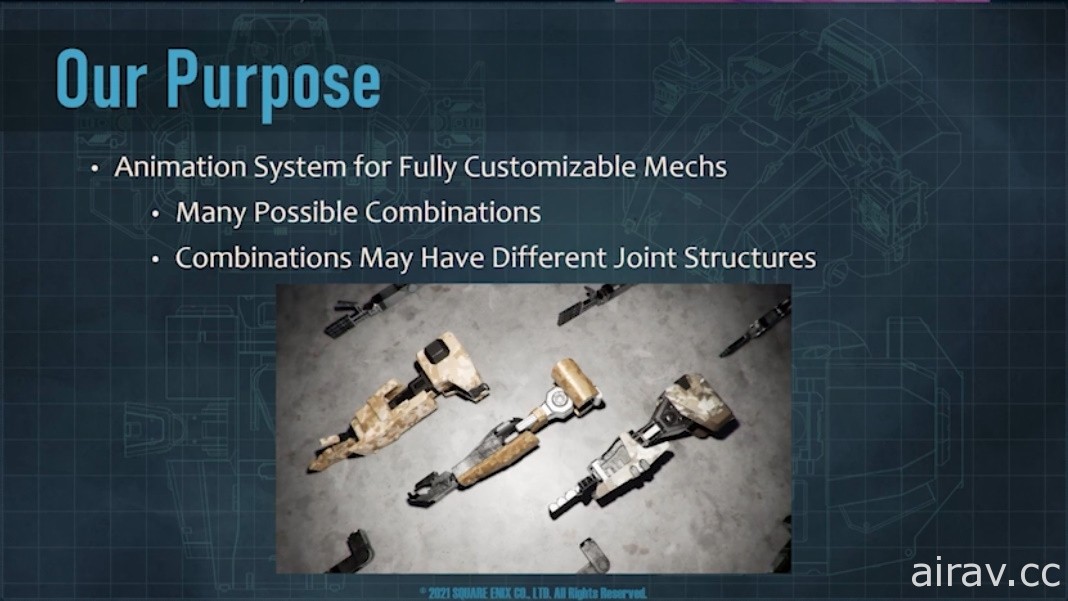

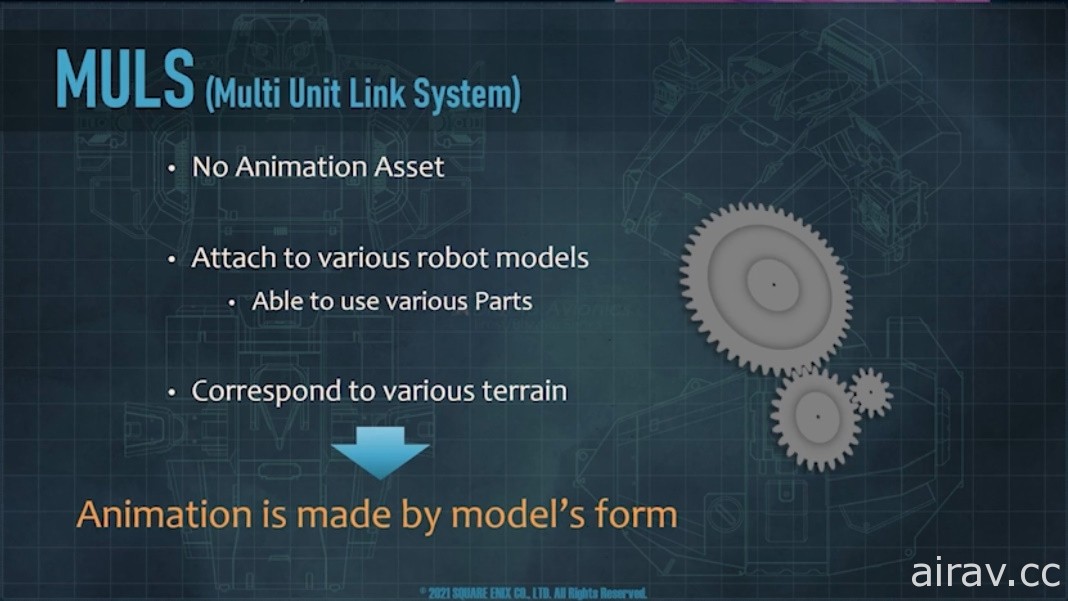
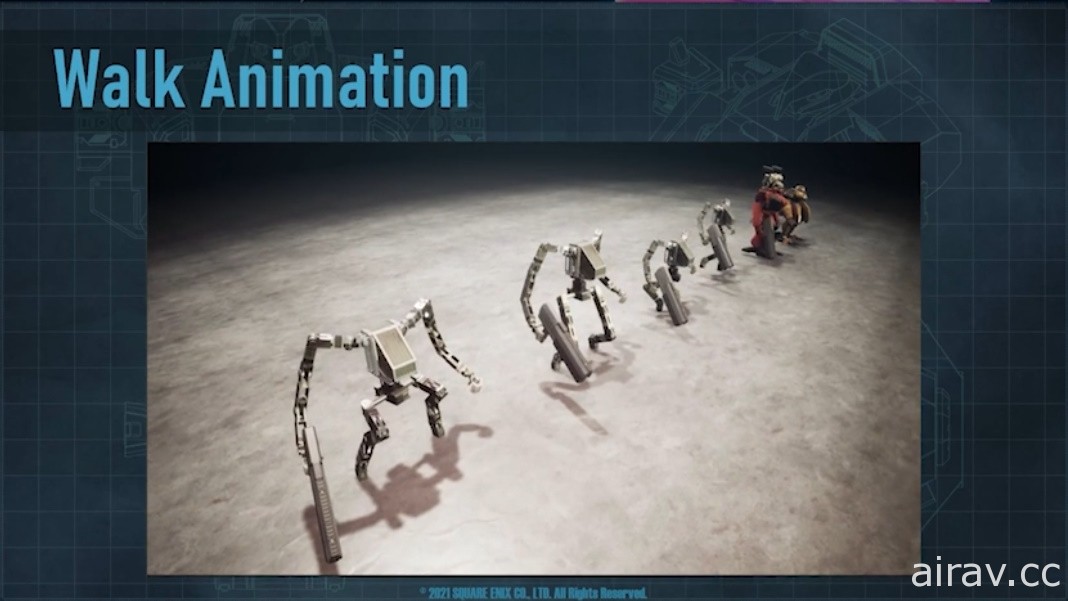
MULS 是以机器人的手部、脚部以及腰部等各种零件的资料为基础,去自动生产动画的系统,可以针对不同零件组合与关节形状产生各有不同风格的动作。这个系统除了可对应各式各样不同外形的机器人以外,甚至还能重现出在不同地形上必须使用不同步行方式时的动作。为了加入这项功能,开发小组则是使用了基于顺运动学与逆运动学之研究的资料。
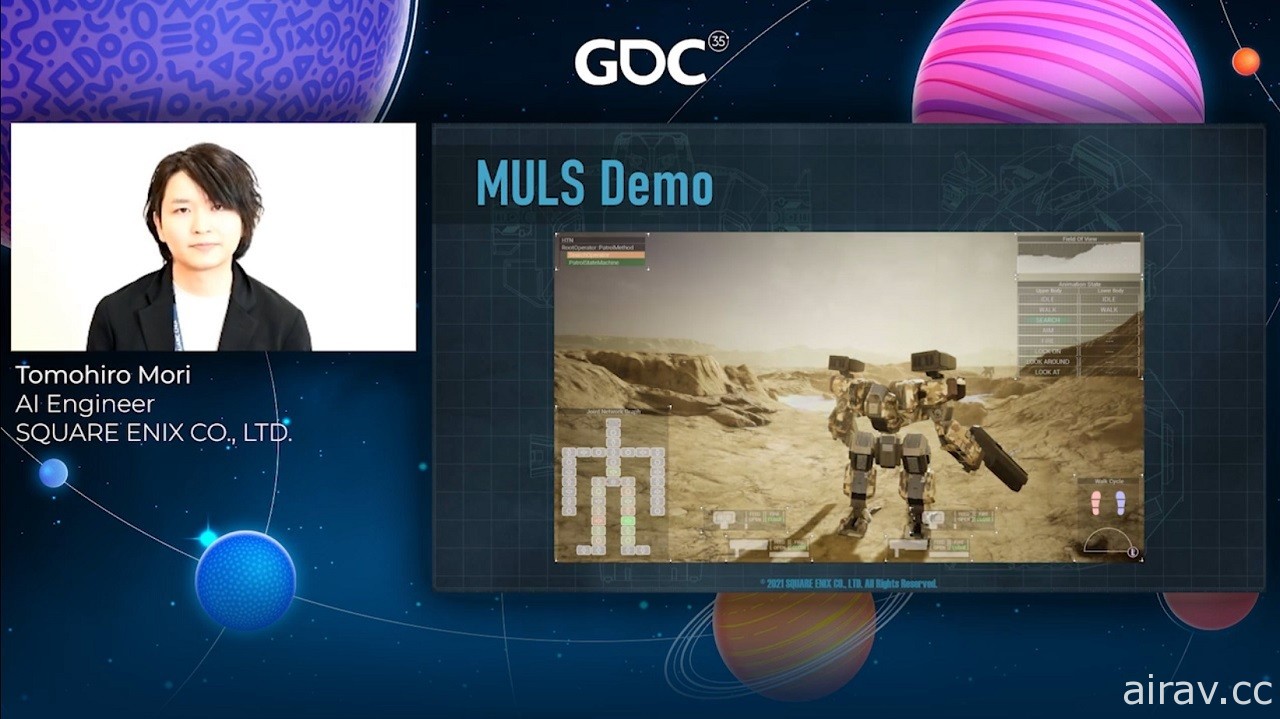
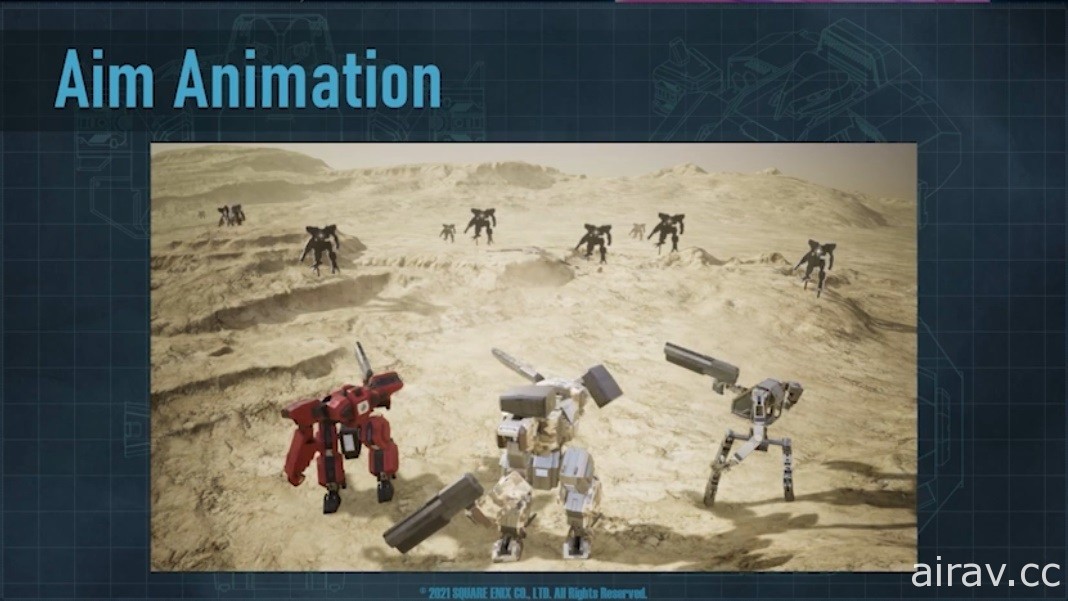
接着公开播放了一段技术展示影片,影片中的机器人开始步行并发现目标,瞄准目标后以拿在左手上的步鎗开始射击。然后又发现一个全新的目标,这次则是使用拿在右手上的步鎗射击。接下来则是对位在远方的目标,使用拿在右手上的步鎗连续发动射击攻击。配合影片播放的这一连串场景,解说包含步行、瞄准、寻找、发现、扫视、空转维持,以及使用左右手武器等等,运用 MULS 产生的各种不同动作。
另外在影片最后,还有一样是以 MULS 制作出来的敌对机器人登场,这时自机因为弹药用尽开始后退,在拉开距离之后发射飞弹击破敌人,还介绍了这样实际在战斗中会出现的动作。




-
》系列中登场的装甲机兵(ヴァンツァー)…… 应该说根本就一模一样的机器人登场。影片中会以“看似”瑟尼斯(ゼニス)的机器人介绍各种不同动作,以及与看起来有一点“像”弗洛斯特(フロスト)的红色敌对机器人战斗等等场景")
光看静态图片可能不是很好看出来,上图就是从技术展示影片中撷取出的图片。有看起来真的很像是《雷霆任务(フロントミッション)》系列中登场的装甲机兵(ヴァンツァー)…… 应该说根本就一模一样的机器人登场。影片中会以“看似”瑟尼斯(ゼニス)的机器人介绍各种不同动作,以及与看起来有一点“像”弗洛斯特(フロスト)的红色敌对机器人战斗等等场景。
以 MULS 制作出来的机器人,是由身体、左右双手,以及脚部这四种零件所构成。这次讲座中公开的机器人虽然是人形,但是只要交换使用各种不同的零件,就可以制作出各式各样不同造型的机器人。在关于步行和瞄准这两个动作的解说当中,有更详细说明到这一点。
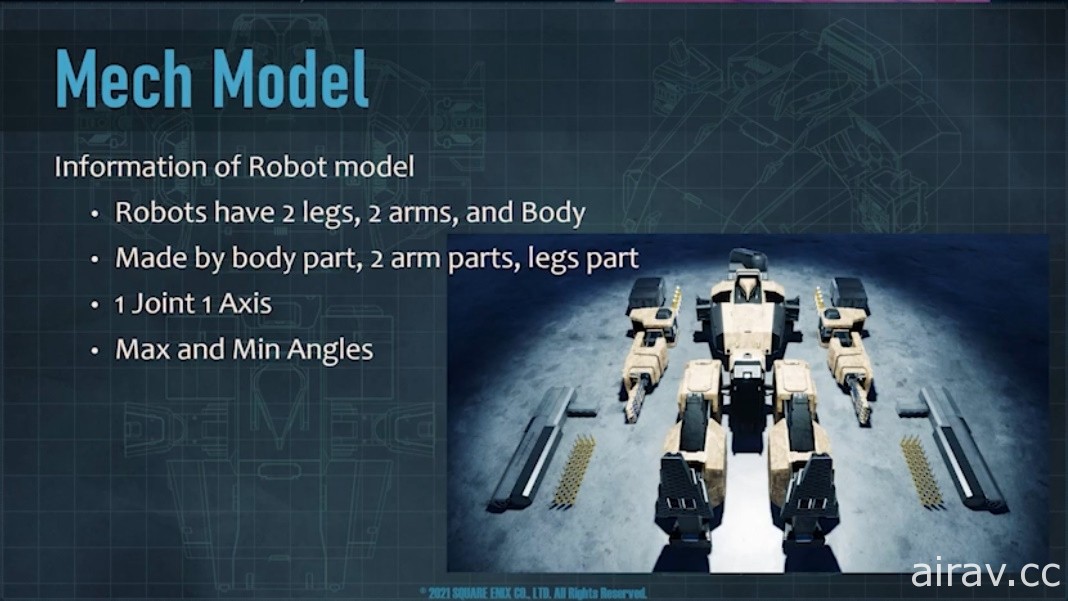
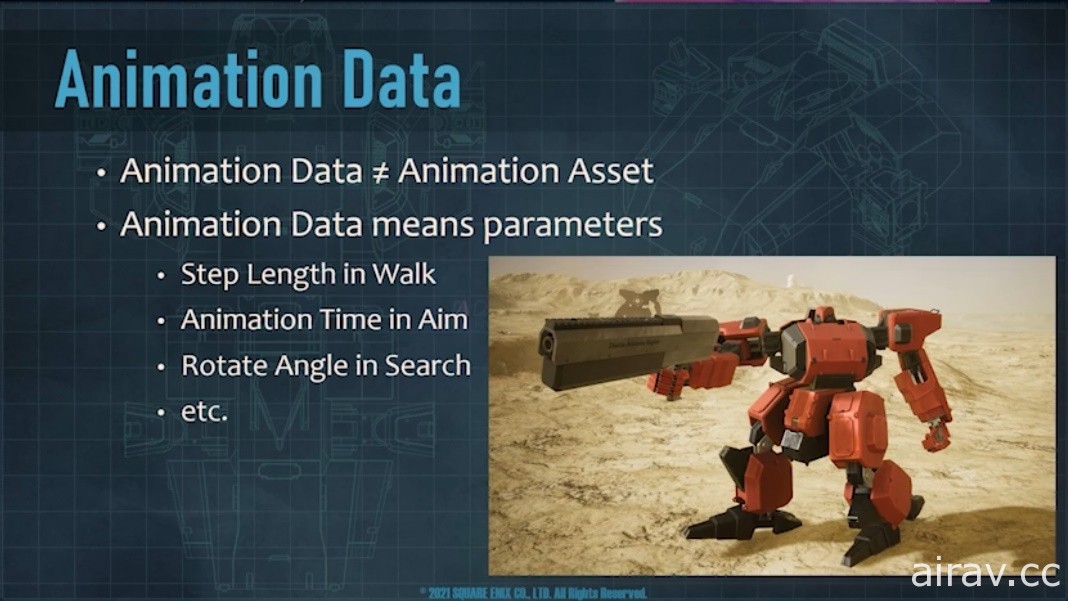
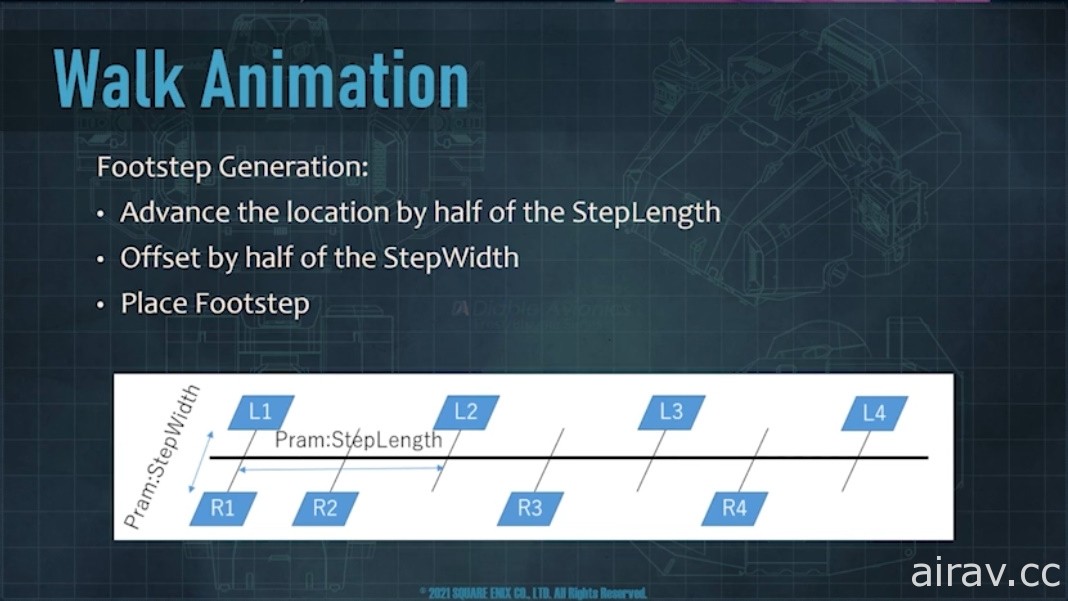
所有部位的可动范围都有设定最大角度和最小角度,这些参数是由零件的形状来决定。虽然机器人的模型资料里有设定好动画资料,但这些动作并不是事先制作好的既有材质,像是在步行时每一脚步的长度、瞄准动作需要花费的时间,以及侦察敌人时要旋转的角度等等都会计算好参数。再以这些参数为基础,重现出会因为机器人外型,以及各种零件组合而会产生差异的动作。
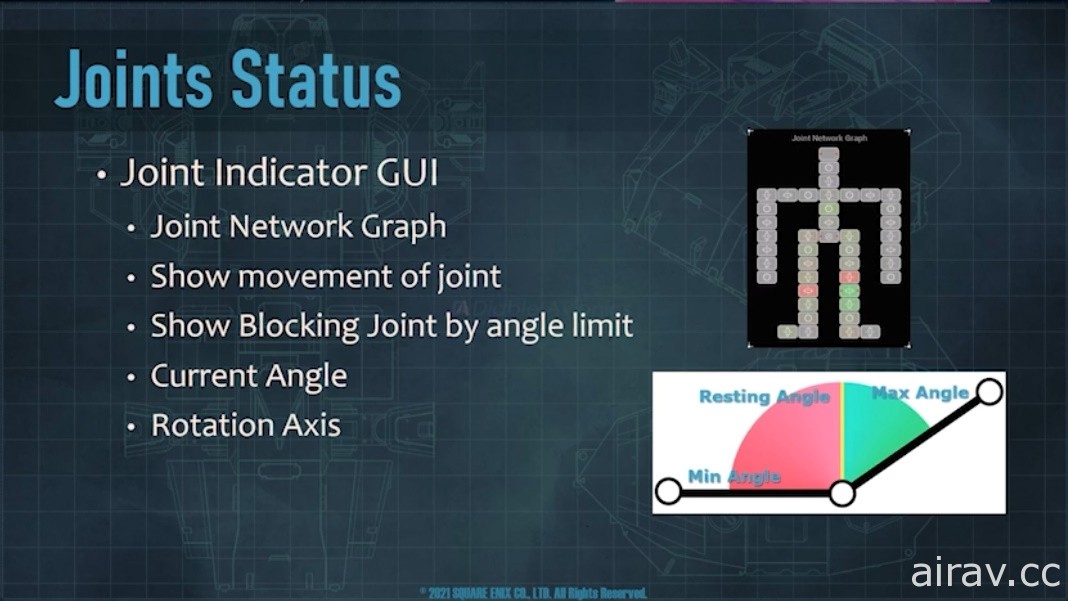
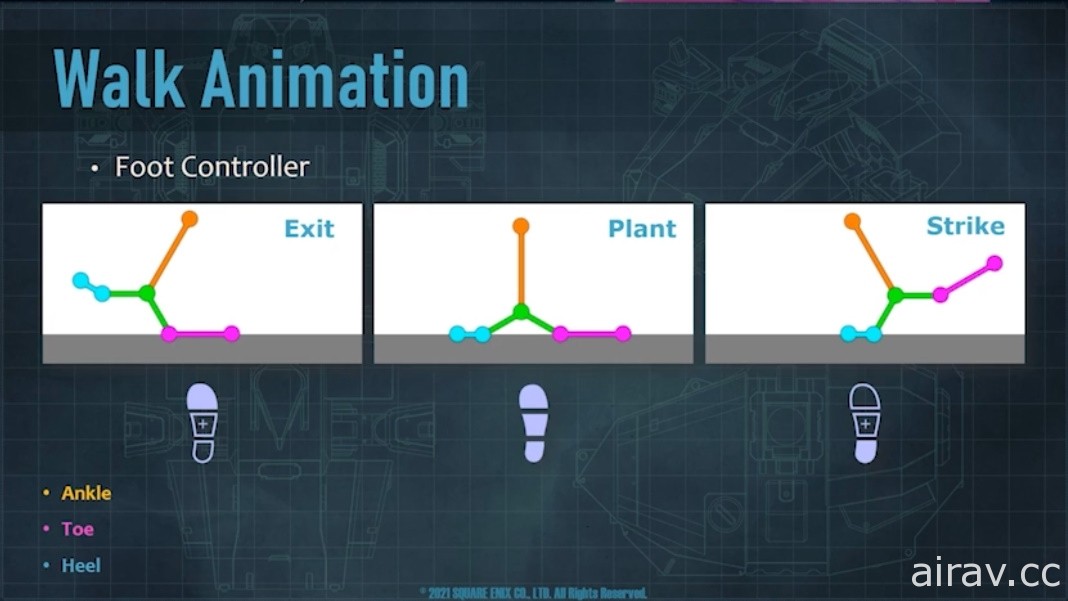
比如说在步行时,就会有脚掌接触地面着地的时候、踩踏地面用力的时候,以及离开地面的时候,这三个关键动作存在,这些动作就是利用像是脚尖、脚怀的形状,以及脚掌接触地面时的角度等等的参数作为基础下去产生。
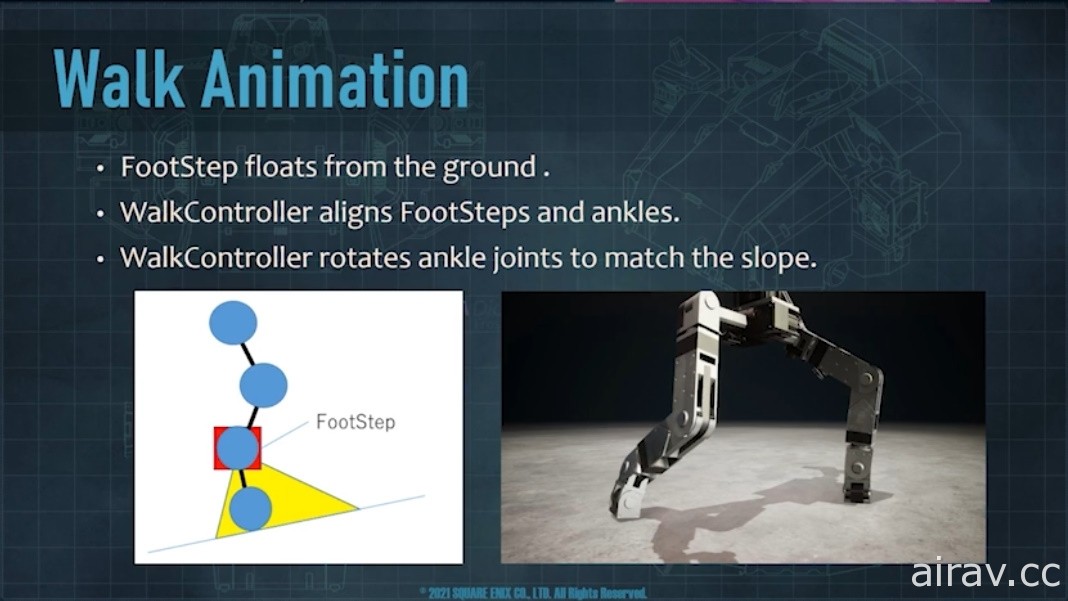
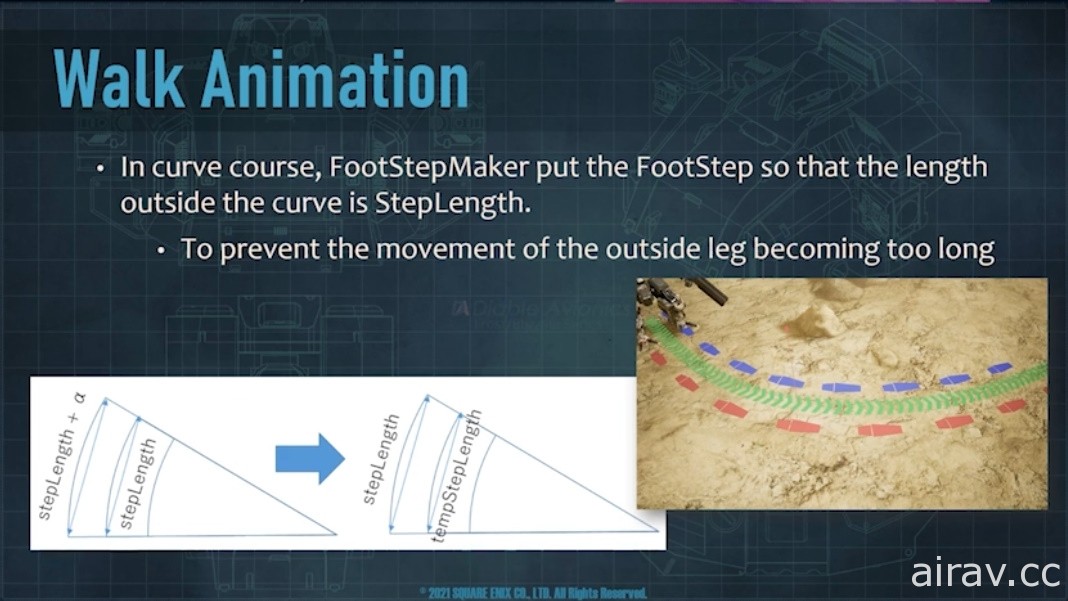
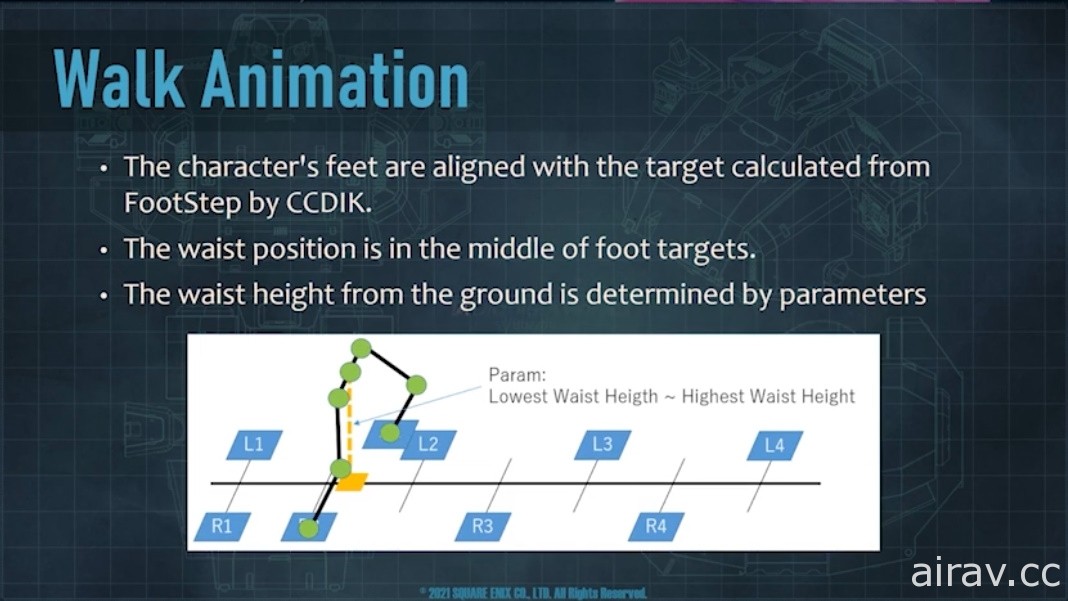
在机器人开始移动前,模拟计算步行轨道的脚步产生器(footstep maker)会先开始运作,然后依照计算结果开始步行。如果是在要转弯的时候,就会促使外侧脚的动作不要变得过大,而内侧脚的动作则是不要变得太小,像这样让各部位零件依照不同场面来动作。除了脚部本身以外,像是承担身体部位重量的脚部零件轴心部份,以及在步行时会上下晃动的腰部高度等等动作表现,也都会受到影响。
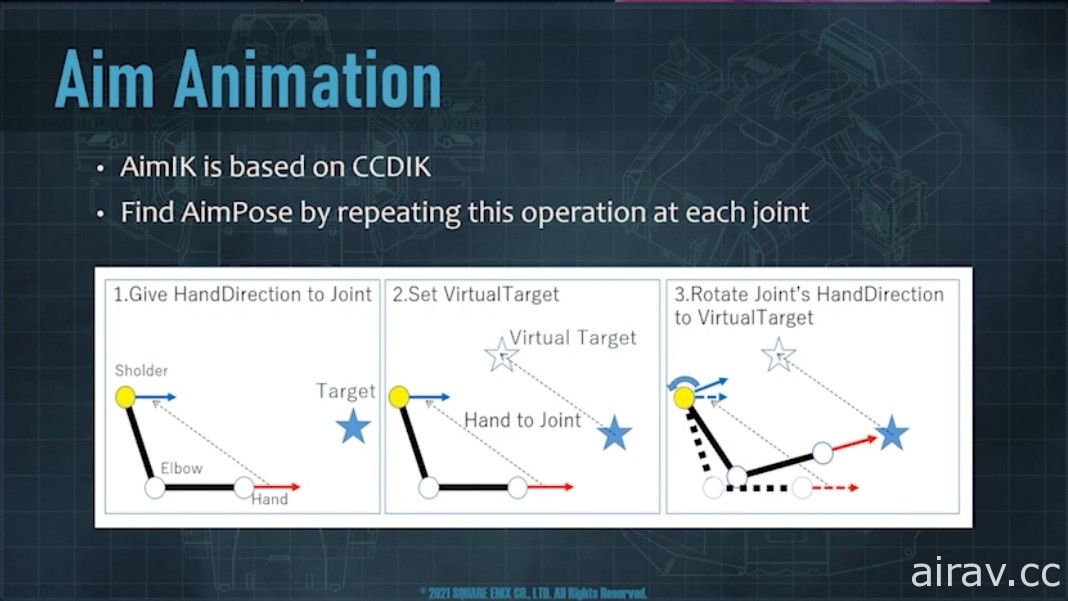
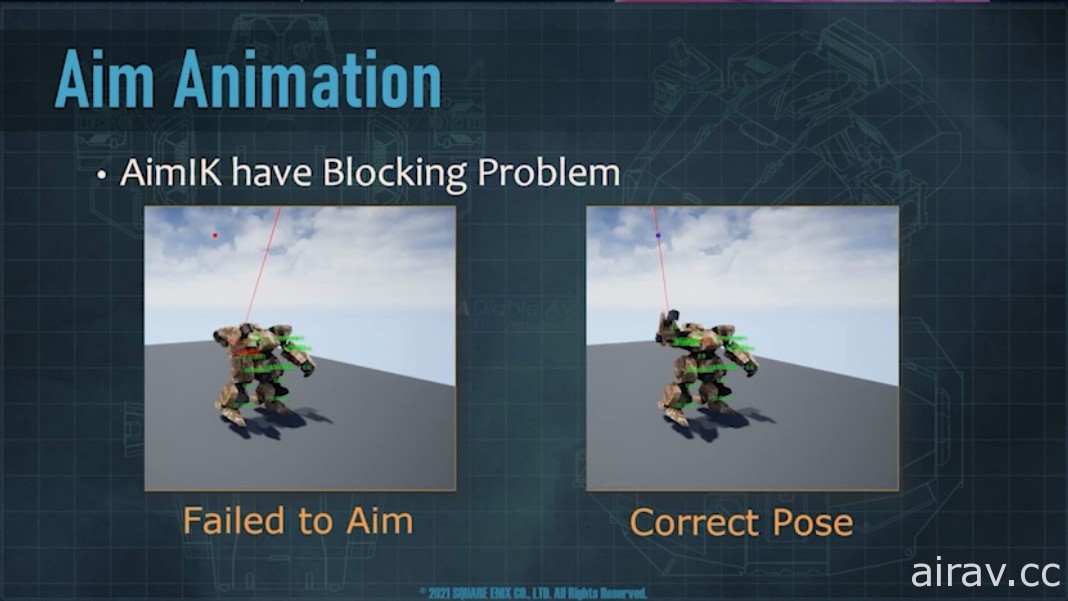
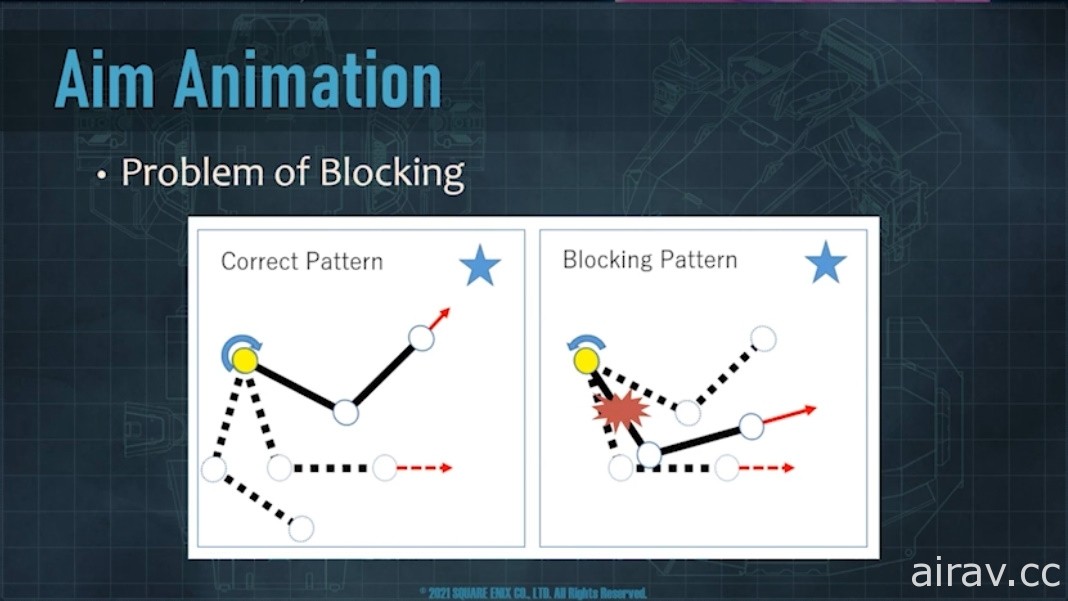
而瞄准时的动作,则是专程为了这个动作编写了一个名为 AimIK 的专用算法,但是却碰上每个零件的可动性限制不会去考虑 AimIK 算法的问题。比如说只要让手部以顺时针旋转就可以自然瞄准到目标的场合,有时却会采取逆时针旋转这种完全不自然的动作。
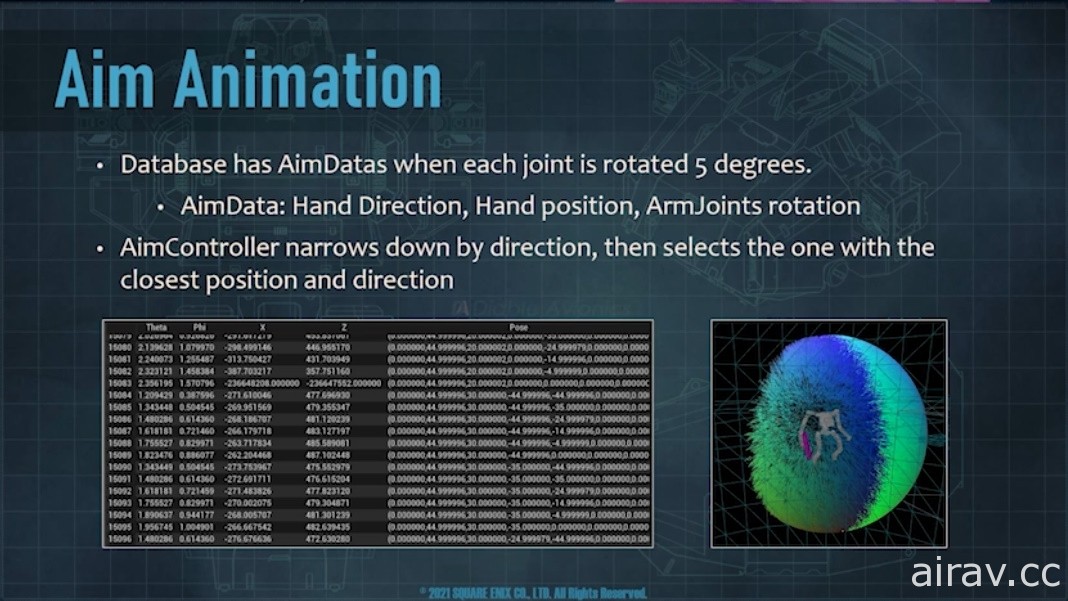
最后虽然使用先准备好各种不同姿势的资料,让程式搜寻数据库找出最合适的姿势,以这种方式解决了这一个问题,但还是留下即使可以顺利摆出瞄准姿势,鎗口方向和角度还是有可能会变得很奇怪的问题有待解决。除此之外,还有像是步行时因为每一张画面都必须要模拟计算,内存和中央处理器消秏资源(特别是在处理关节较多的机器人时)就会变得很高,以及在某些可动范围下可能会摆出奇怪姿势的问题存在。
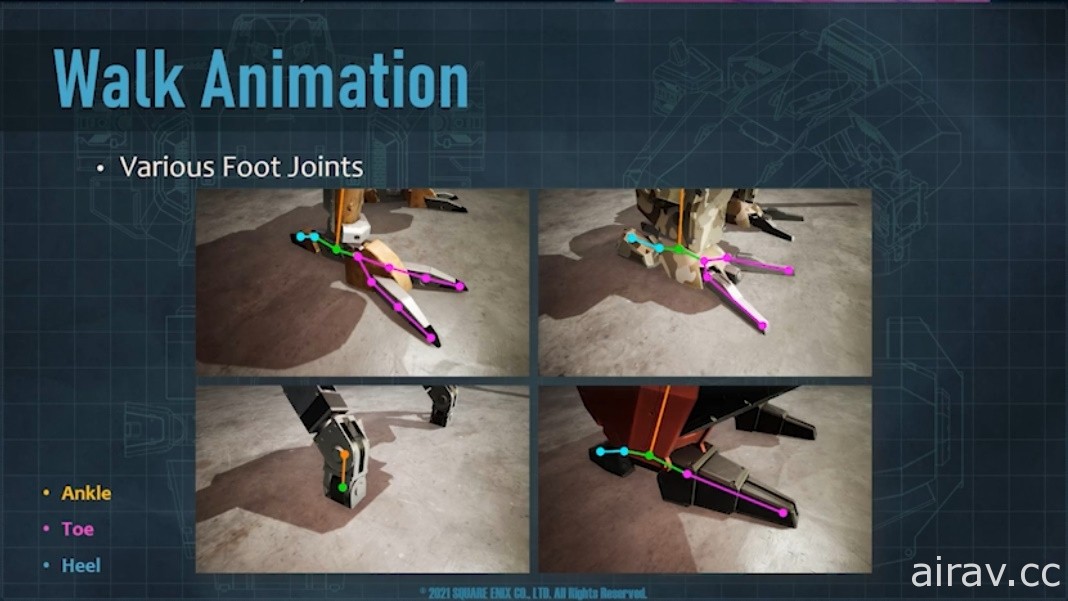
现在机器人的种类一共有 75 种,每一种的脚部关节构造和数量都不同,所以能够表现出各种不同的动作。像是有复数脚尖和脚踝,又或者是根本没有脚尖的造型都有,看起来可以对应各式各样不同的机器人。


虽然这次公开的机器人都是人形机器人,但是开发团队也有测试过四脚型的机体,以及手臂固定在机身上等各种不同的机体造型。而且虽然目前还没有办法达成,但是最终目标是要能自动产生出“帅气的姿势”。因为在系统层面上还有一些问题存在,如果不完全解决的话并没有办法当作产品推出,在今后将会继续化解这些问题,同时更进一步扩张系统功能。
看完虽然让人非常期待会有全新机器人游戏作品出现,但目前终究只是处在游戏开发研究的阶段。并不是说马上就会有采用这个系统的新作要发表,但光是目前这个阶段的技术展示就已经让人很感兴趣,所以很期待这个系统日后的发展。








